- 成果阶段:中试
- 技术领域:生命健康
- 成果类型:发明
- 交易类型:转让普通许可独占许可排他许可入股
【痛点问题】
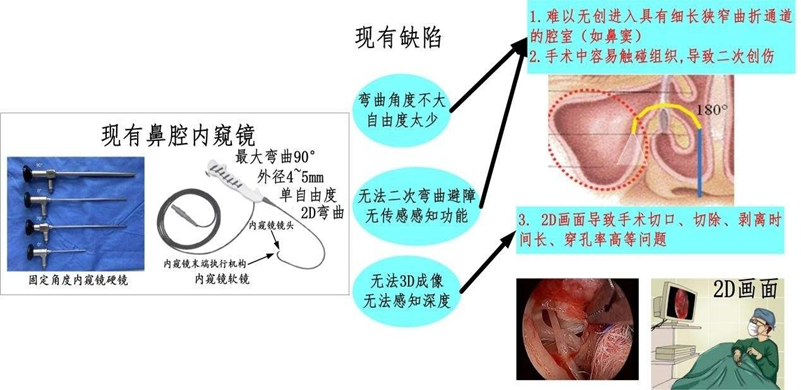
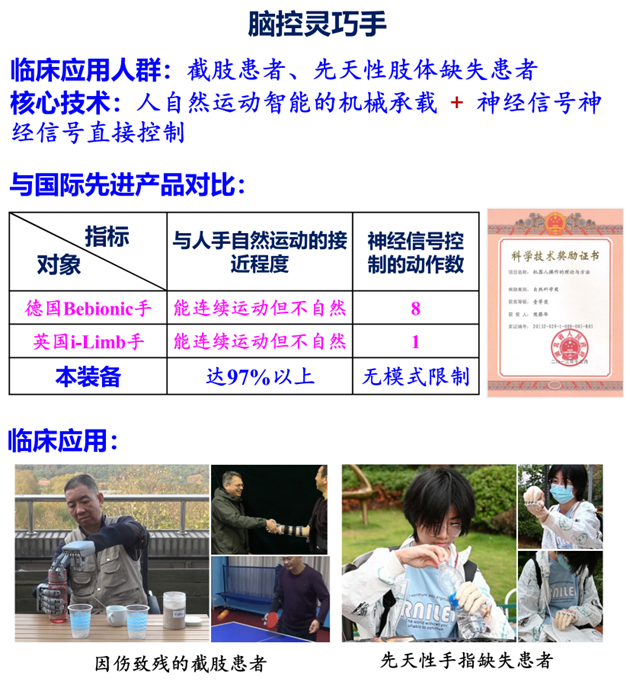
全球肢体缺失患者人群庞大,现有的肢体运动功能再造技术,其运动灵巧性和控制方式,尚无法使患者像控制自己原本肢体那样控制机器人肢体,无法实现随心所欲的自然功能运动。患者接受率低,缺乏使用的积极性。
【解决方案】
突破了把人手复杂肌骨系统承载的运动智能转移到灵巧手,以及残肢神经信号与灵巧手驱动器1对1连接通道构建等关键技术。
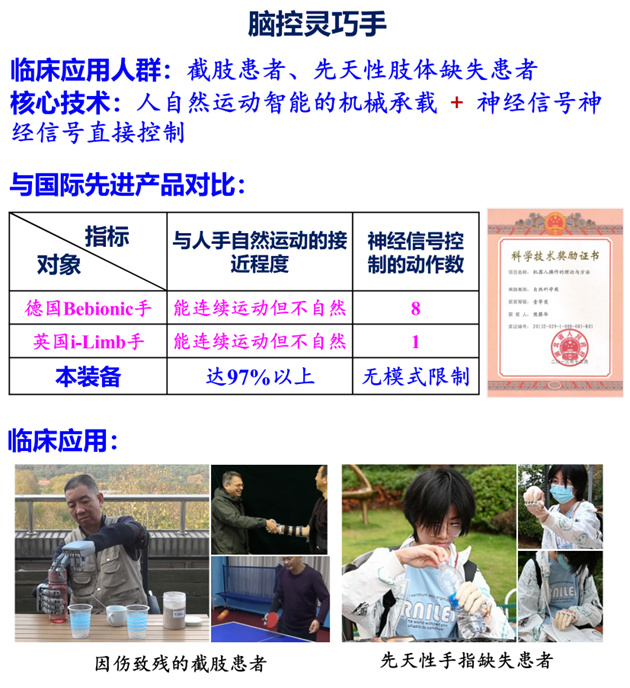
图1 成果展示
【技术指标】
相关技术指标及其对比如下表:
表 1 技术指标对比
|
性能指标 |
本技术 |
德国Michelangelo手 |
英国Bebionic手 |
英国iLimb手 |
|
关节数 |
拇指:4个, 其余:3个 |
拇指: 2个,其余四指:1个/指 |
拇指:3个 四指:2个/指 |
拇指:3个 四指:2个/指 |
|
驱动器数 |
4 |
2 |
5 |
5 |
|
与人手自然运动的接近程度 |
≥97% |
≤30% |
≤30% |
≤30% |
|
神经控制方式 |
神经信号直接连续控制 |
模式信号触发控制 |
模式信号触发控制 |
模式信号触发控制 |
【竞争优势】
在国际首次实现灵巧手由呆板固定模式运动向自然连续运动跨越(与人手自然运动接近程度达97%),实现了70年来人手再造技术的革命性变化。
【资质荣誉】
国家技术发明二等奖
湖北省自然科学一等奖
【技术成熟度】
可量产。
【产业化应用】
应用前景
应用于截肢患者和先天肢体缺失患者;
市场容量:中国超过1000亿元、全球超过1.47万亿元。
应用案例
依托协和医院,应用于2名先天肢体缺失患者的运动功能再造。
依托省残联,应用于3名截肢患者的运动功能再造。
发展规划
2025年:实现1-2款脑控灵巧手上市销售
2026年:丰富产品布局,引领国内脑控灵巧手装备研制